Mechanical Walking Rickshaw
In the process of creating the mechanical walking rickshaw, we were tasked with creating five concept sketches to aid in developing our final CAD design.
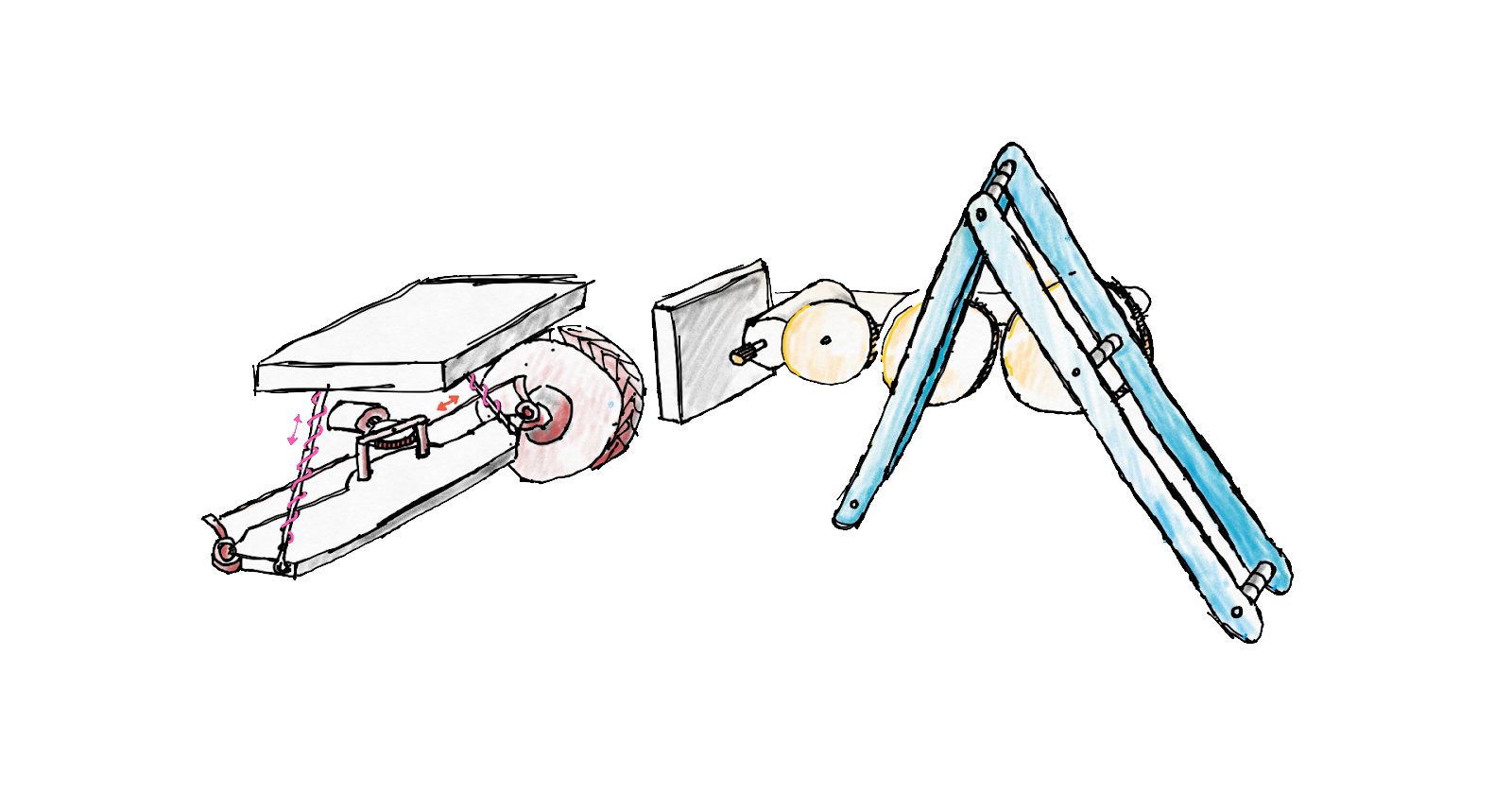
Concept Drawing #1
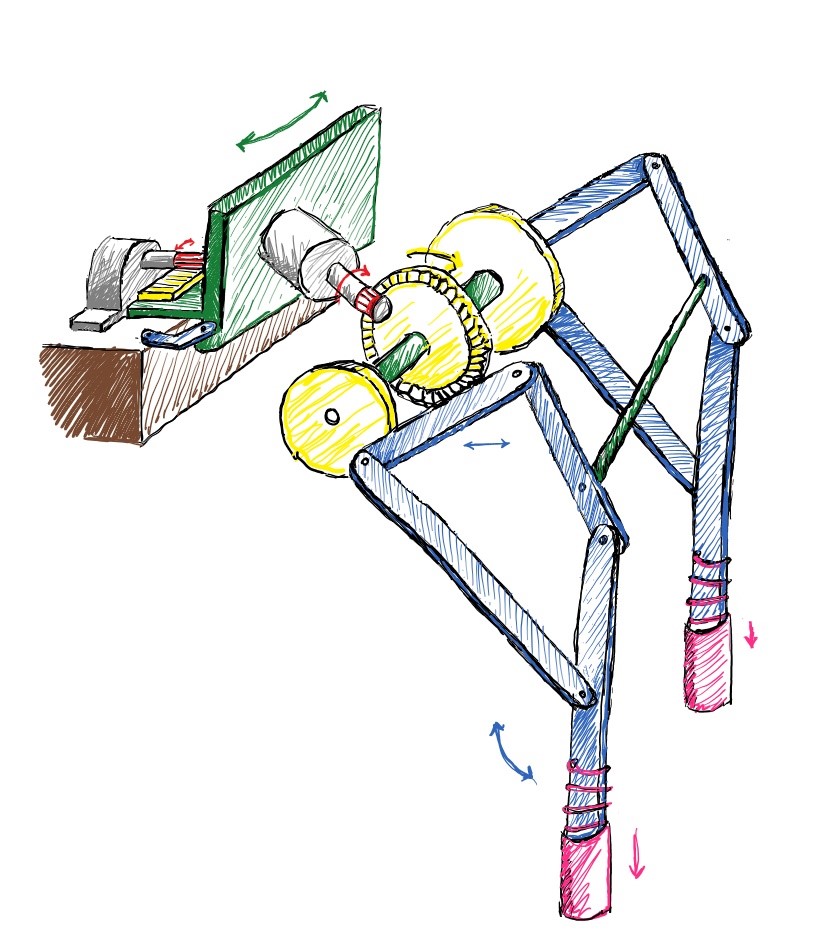
For the first concept, we noticed a couple issues: incorrect suspension usage, complex steering mechanism, and an over-functioning motor.
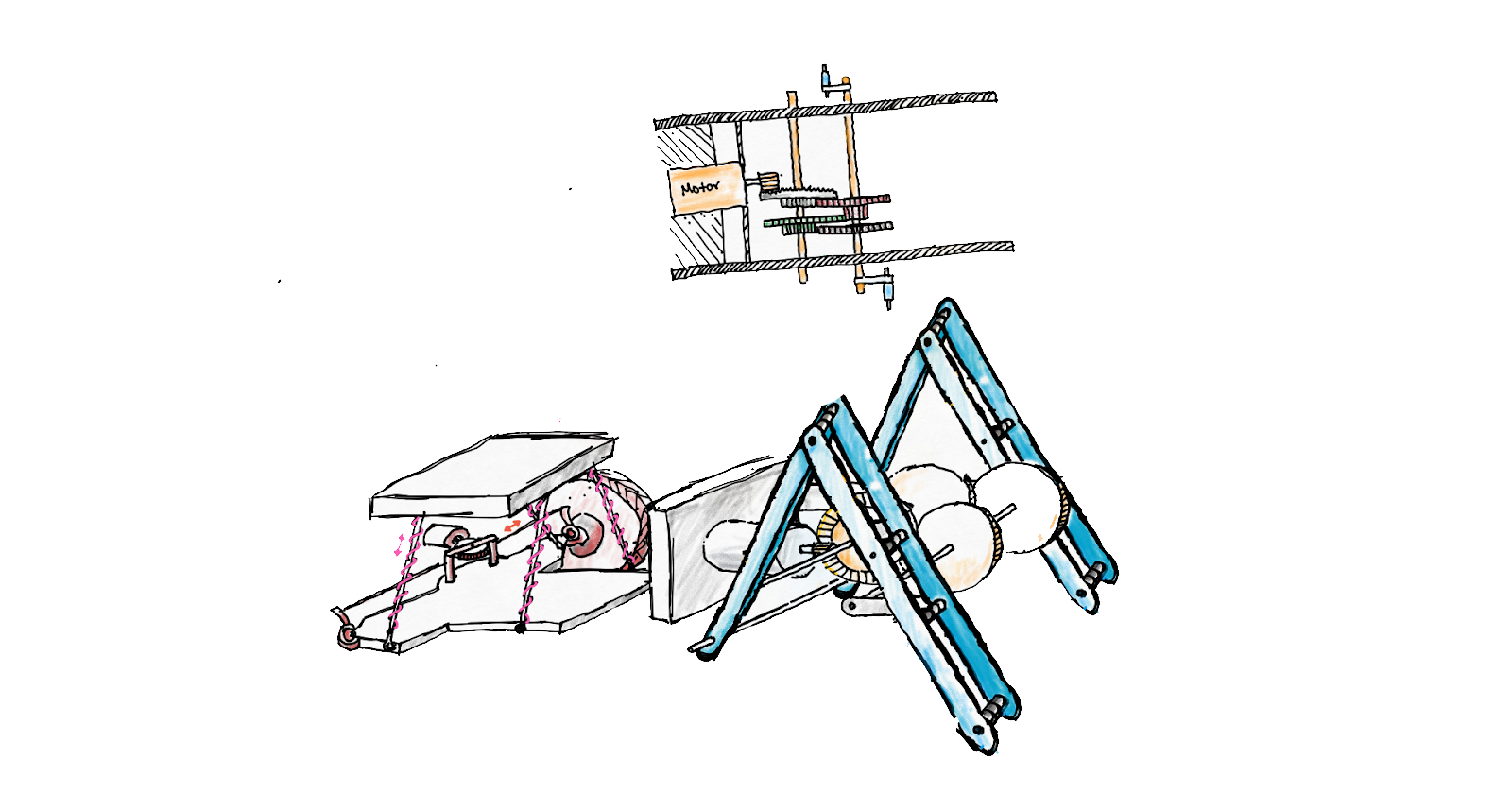
Concept Drawing #2
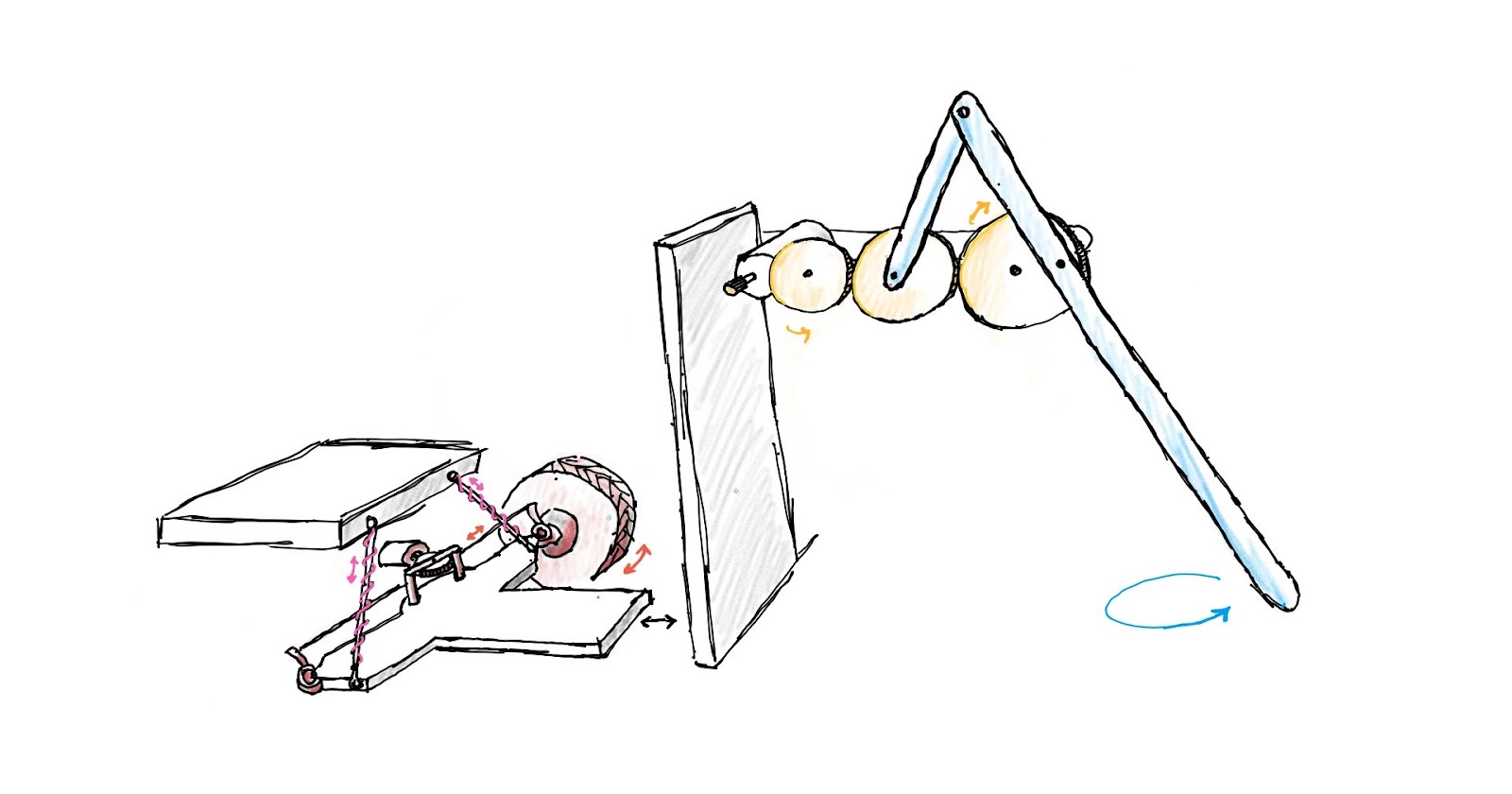
After fixing the previous issues, we noticed unnecessary elevation between the carriage and the walking mechanism.
Concept Drawing #4
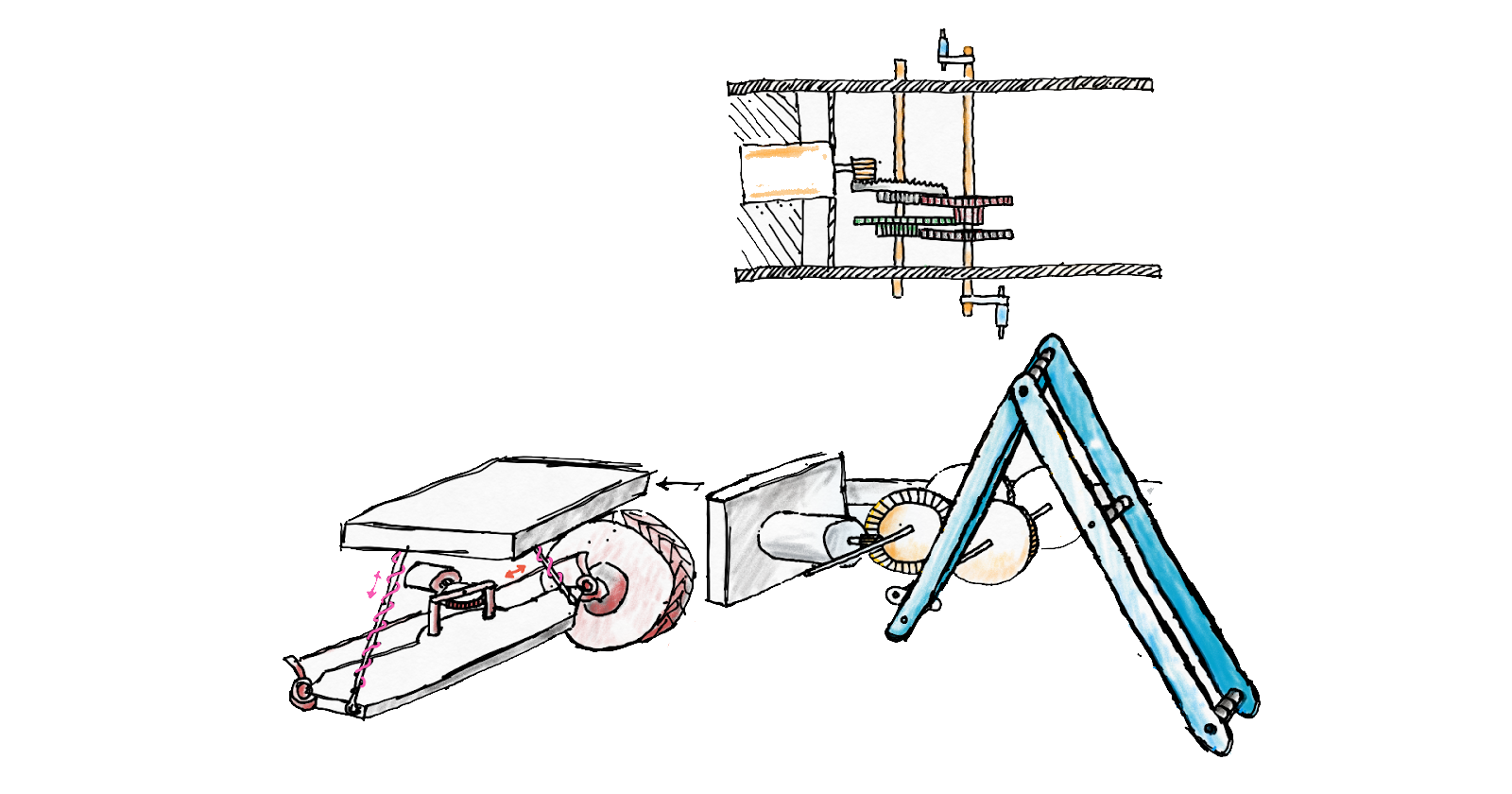
In the fourth concept, we needed to fix the bounciness that was a result of the third concept.
Concept Drawing #3
For this concept, we decided to strengthen and shorten the "legs" of the rickshaw decrease weight while providing more support.
Concept Drawing #5
For our fifth concept, we altered the suspension and legs. This changes increased the overall stability and efficiency.
After completing the concept sketches, we created the final prototype design.
Final Prototype Design
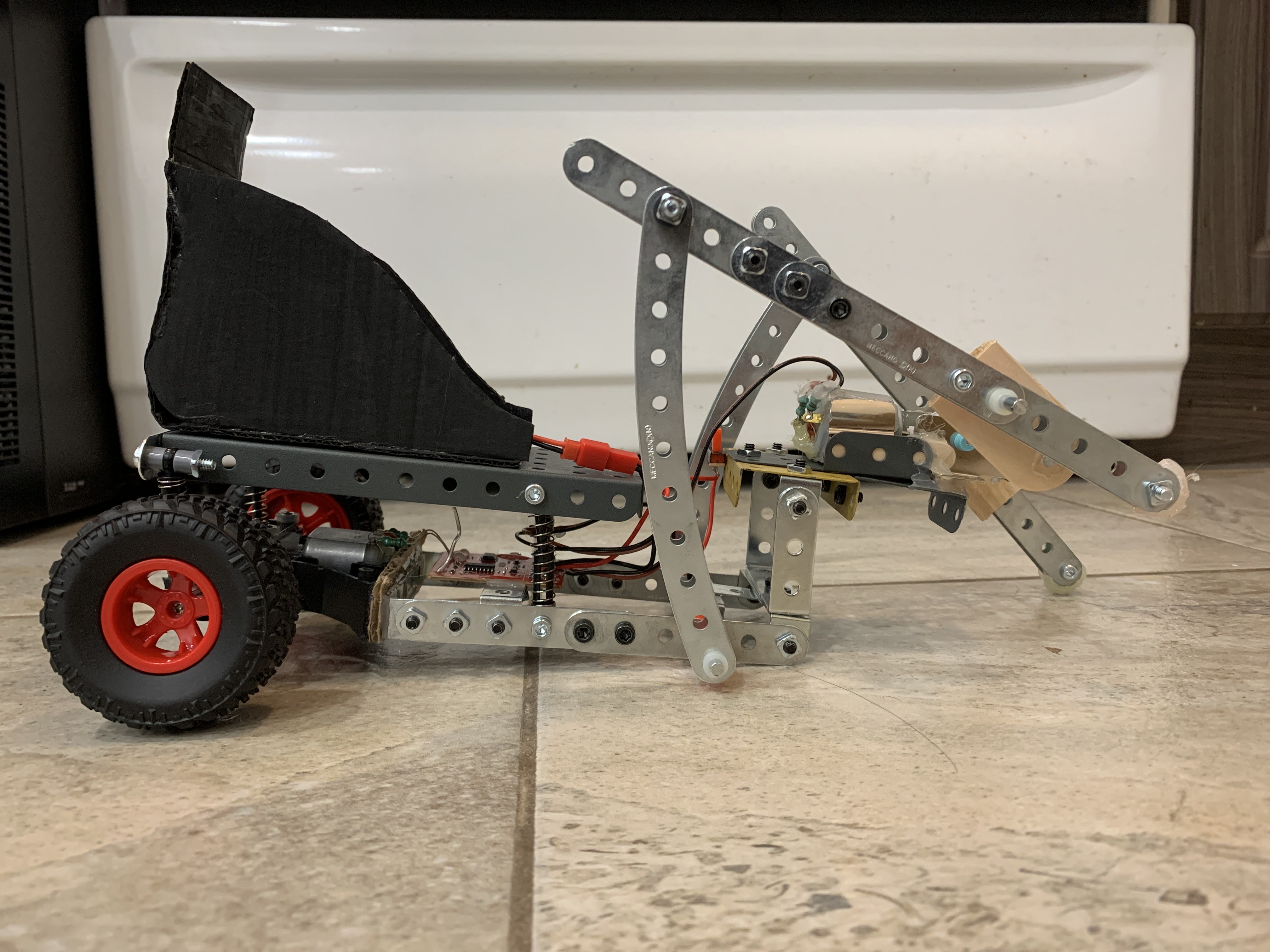
We wanted to ensure that at the minimum, our prototype had the ability to travel at a speed of 0.1m/s and have the ability to steer and brake. We also implemented a suspension system, gear-reduction, and all-terrain functionality.
Gear Reduction
Using a gear ratio of 60:1, we were able to reduce the speed of the motor enough for the rickshaw to function as intended.
Steering
Using the implemented steering system, the rickshaw was able to rotate the wheels at least 20 degrees.
Suspension
The implemented suspension system allowed for the rickshaw to travel smoothly.
All-Terrain Functionality
Hardwood Flooring
Carpet Flooring
Grass
Pavement

CAD Simulations
Assembly
Suspension System
Gear-Reduction System
Braking System
Steering System